 近藤研のフレキシブルアーム
近藤研のフレキシブルアーム
Up:藤本のホームページへ
1. 自己紹介 ,
2. 研究紹介 ,
3. 発表文献一覧 ,
4. 個人情報(趣味等)
 2001年4月から長岡技術科学大学電気系
パワーエレクトロニクス研究室(パワー研)に助手として所属し、
近藤研究室の
大学院生と磁気ディスク装置とフレキシブルアームのモーション制御やインバータの高性能制御の研究を、
野口研究室
の大学院生と電気自動車の雪面運動安定制御の研究をしています。また、同じくパワー研の
大石研究室とは研究分野が最も近く、
大石先生には学生時代からよくアドバイスを頂いていました。
2001年4月から長岡技術科学大学電気系
パワーエレクトロニクス研究室(パワー研)に助手として所属し、
近藤研究室の
大学院生と磁気ディスク装置とフレキシブルアームのモーション制御やインバータの高性能制御の研究を、
野口研究室
の大学院生と電気自動車の雪面運動安定制御の研究をしています。また、同じくパワー研の
大石研究室とは研究分野が最も近く、
大石先生には学生時代からよくアドバイスを頂いていました。
この写真は近藤研のメンバーが、渡米前に壮行会を開いてくれたときの一コマです。
一列目の真ん中が私(藤本)です。
パワー研での大学院生との研究活動の紹介として、大学院生と共著で発表した論文の一部を紹介します。
 磁気ディスク装置(HDD)のヘッド位置決め制御
磁気ディスク装置(HDD)のヘッド位置決め制御
 インバータの制御(RT-Linuxでも動作可能)
インバータの制御(RT-Linuxでも動作可能)
 多関節ロボット(準備中)
多関節ロボット(準備中)
 野口研の電気自動車
野口研の電気自動車
野口研斉藤君による紹介のページ
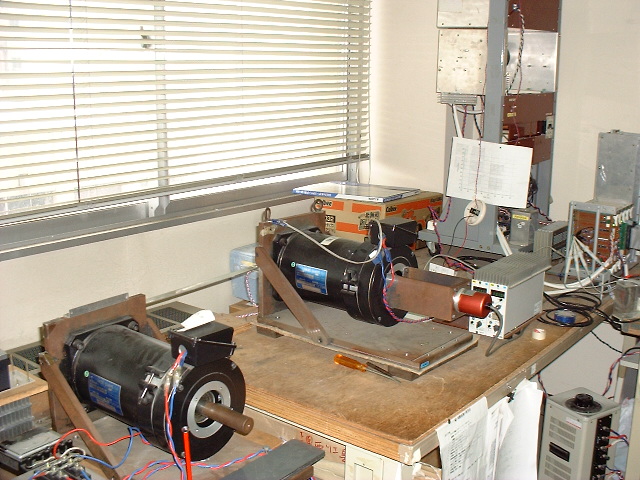
近藤研のフレキシブルアーム
本論文は前半部では、1) マルチレートフィードフォワード制御を用いた完全 追従制御(Perfect Tracking Control: PTC)、2) マルチレートフィードバック 制御を用いた完全外乱抑圧制御(Perfect Disturbance Rejection: PDR)、3)マ ルチレートサンプリング制御を用いた完全状態一致制御(Perfect State Matching: PSM)による制御器の離散化法というマルチレート制御系の新しい理 論的枠組を構築した。後半部では、これらの核となる制御理論を、ロボット・ サーボモータ・ハードディスク装置・2慣性系・ビジュアルサーボ系などの実 システムに応用し、計算機シミュレーション及び実機実験により、その有効性 を明らにした。
本論文の内容及び構成は、以下のようになっている。
第1章では、従来のマルチレートサンプリング制御の研究を振り返り、その問 題点を明らかにし、本研究の位置付けを行なった。従来からマルチレートサン プリング制御に関しては、零点配置・強安定化・同時安定化など様々な理論的 研究が行なわれてきたが、制御入力が振動的になるなどの問題点が指摘され、 これまでにこれらの研究が実システムに応用されたケースは数少ない。また、 低精度エンコーダを用いたサーボモータの速度制御系や、ハードディスク装置 に対して、マルチレート制御を適用する試みもなされてきたが、各アプリケー ションに対して固有の理論に留まっており、統一的な制御理論を構築する段階 には到達していない。このような従来の研究を踏まえ、本論文ではマルチレー ト制御の統一的な理論体系を構築し、さらに実システムに応用し、実用的な制 御方式に発展させた。
目標軌道に対して追従を行なう追従制御系において、従来のディジタル制御方 式であるシングルレート制御系では、離散時間制御対象が必ず不安定零点を持 つことから、安定な逆系を構成することが不可能となり、その結果大きな追従 誤差を生じる問題点があった。これに対して、本論文の第2章ではマルチレー トフィードフォワード制御という新しい制御手法を導入して、誤差なく目標軌 道に追従する完全追従制御(PTC)を提案した。さらに、この手法をハードウェ アの制約によりサンプラやホールダの機構に制限がある系や、むだ時間を持つ 系に対しても対応できるよう理論の拡張を行なった。また提案する制御器が、 伝達関数に基づく簡単な計算により容易に設計できることや、その構造が非常 に見通しが良いことを明らかにした。
モーションコントロールにおいては、制御出力のサンプリング周期が制御入力 の周期よりも長いという制限を持つ制御系が数多く存在する。例えば、ハード ディスクのヘッドの位置決め制御系では、ディスク上に離散的に書かれたサー ボシグナルが検出されたときのみ位置信号が検出されるが、最近の高速なプロ セッサを使用すれば、制御周期を信号検出の周期よりも4倍程度は高速に設定 することが可能である。また、ロボットのビジュアルサーボ系においては、視 覚信号は33[ms]程度のビデオレートでしか検出できないが、制御入力となるジョ イントサーボ系の制御周期は1[ms]以下と非常に高速である。さらに、低精度 エンコーダを用いたサーボモータの速度制御系においては、速度信号の検出周 期を短くすると、低速時に量子化誤差の影響が非常に大きくなることから、サ ンプリング周期を十分に大きく設定することが不可能である。また、近年プロ セッサを搭載し、信号処理と通信の機能を追加した高性能なエンコーダが開発 されつつあるが、これを使用したモーション制御系においては、位置信号の検 出周期は通信の周期に固定化される。
このようなサンプリング周期が相対的に大きい系においては、従来のシングル レート制御方式では、ホールダによる大きな位相遅れにより安定性が損なわれ る問題点や、ある程度高い周波数領域において、外乱抑圧特性が劣化するとい う問題点があった。これに対して第3章では、サンプル点間オブザーバとマル チレートフィードバック制御という新しい制御手法を提案し、これにより安定 余裕が大幅に改善される手法と、定常状態においてサンプル点間に複数回、外 乱を完全に抑圧する制御手法(完全外乱抑圧制御:PDR)を提案した。さらに、開 ループオブザーバとスイッチ機能を持つフィードフォワード制御器を導入すれ ば、ロバスト安定性を犠牲にすることなく、外乱を効果的に抑圧する制御系が 構成できることを明らかにした。
ディジタル制御系の設計においては、従来は連続時間領域で設計した望ましい 補償器を離散近似するという手法が適用されていた。しかしながら、制御性能 の向上のためには、制御帯域を限界まで広げる必要がある。このような場合に は、サンプリング周波数が十分に高いという仮定が成立しなくなり、従来型の 近似的に離散化した制御器では、望ましい性能が得られる保証がなく、制御系 が不安定になってしまうことすらある。このような現状に対して、第4章はマ ルチレートサンプリング制御を導入して閉ループ特性を保存する新しい制御器 の離散化の手法を提案した。その特徴は、ディジタル制御系の状態変数の閉 ループ時間応答が、連続時間領域で設計した望ましい応答に完全に一致(完全 状態一致:PSM)するというものである。さらに、サンプリング周期が比較的長 い系にも対応できるよう理論的拡張を行なった。
本論文の後半では、前半部で構築した理論を、実際のモーションコントロール 系へ適用した。第5章では、まず最初に第2章で提案したマルチレートフィード フォワード制御による完全追従制御(PTC)を、DDロボットのサーボモータの位 置制御系に対して実験及びシミュレーションを行ない、従来型の手法に比べて、 追従性能が格段に優れていることを実証した。次に、ハード ディスク装置のヘッドの高速移動制御に適用して、その有効性を確認した。そ の成果は、最も重要とされているショートスパンシーク動作を、ハードウェア の大きな改良をすることなく、従来手法よりも飛躍的に高速化できるというも のであった。
第6章では、第3章で提案したマルチレートフィードバック制御による完全外乱 抑圧制御(PDR)をハードディスク装置の高精度位置決め制御、及びロボットの ビジュアルサーボ系に適用した。まず、ハードディスク装置に対して、提案す るサンプル点間オブザーバを用れば、ホールダによって生じる大きな位相遅れ が回復でき、安定余裕が大きく向上することを明らかにした。さらに完全外乱 抑圧制御により、従来手法では不可能とされていたナイキスト周波数に近い高 周波領域においても、効果的にRepeatable Runoutと呼ばれる周期的な外乱が 抑圧できることを示した。 さらに、ビジュアルサー ボ系に対して、作業空間コントローラと非線形写像を導入することにより線形 化を行ない、提案するマルチレートフィードバック制御系を適用した。これに より、周期的な運動を繰り返す目標物体に対して、誤差なくロボットを追従さ せることが可能となることを示した。
第7章では、第4章で提案した完全状態一致制御(PSM)による制御器の離散化手 法をモーションコントロールに適用した。まず最初に、外乱オブザーバを用い たサーボモータのロバスト位置決め制御系に対して提案手法を適用し、従来手 法よりも限界に近い高性能な設計が可能となることを明らかにした。 次にハードディスク装置の振動抑制制御系 に対して、本手法を適用すれば、従来は不可能とされていたナイキスト周波数 周辺の振動抑制制御がマルチレート制御により可能となることを明らかにした。
第8章では、本論文のまとめとして、提案した完全追従制御・完全外乱抑圧制 御・完全状態一致制御の理論を振り返り、フィードフォワード、フィードバッ クの両面性や、ハードウェアによるサンプリング機構の制限に関する視点や、 応用可能なシステムに基づく観点から、提案した手法のそれぞれの関連性を見 通し、本論文がマルチレート制御の統一的な枠組を確立することに成功したと 結論づけた。本論文は制御理論的な新規性も重要であるが、コンピュータの性 能を限界まで利用する、実用的な制御法であるという観点からも、その工学的 重要性は計り知れない。本論文の後半で述べた適用例は、従来の制御手法の性 能を遥かに凌駕し、実際の製品にも適用され、実用化されている。この事実か らも本研究が制御工学に新たなブレークスルーを与え、従来のモーションコン トロールが超えられなかった壁を打破することに成功したと言うことができる。
なお、本文は英語により記述されていることを付記する。