懖嬈尋媶偺夞楬
懖嬈尋媶偺僥乕儅丗RISC儅僀僐儞傪梡偄偨PWM僀儞僶乕僞偵傛傞桿摫儌乕僞偺惂屼
偲偄偆偙偲偱丆懖嬈尋媶偱偼嵟弶偼偣偙偣偙夞楬愝寁偟偰嶌偭偰丆
嵟屻偺傎偆偼僾儘僌儔儉嶌偭偰偖傞偖傞儌乕僞乕傪夞偟偰傑偟偨丏
懖尋偱嶌偭偨幚尡僔僗僥儉偺峔惉恾丏
僷僜僐儞偱儅僀僐儞偺惂屼僾儘僌儔儉乮C尵岅乯傪嶌惉丆僐儞僷僀儖偟偰儅僀僐儞偵揮憲丏
偦偟偰偦偺僾儘僌儔儉偱儅僀僐儞傪摦嶌偝偣偰PWM僀儞僶乕僞傪惂屼偟丆桿摫婡偺惂屼傪峴偭偰傑偟偨丏
嵟廔栚昗偼桿摫婡偺儀僋僩儖惂屼偩偭偨傫偱偡偑丆V/f堦掕惂屼偲偡傋傝廃攇悢惂屼傑偱傗偭偨偲偙傠偱丆
儅僀僐儞偺墘嶼懍搙揑偵傕丆尋媶婜娫揑偵傕尷奅傪寎偊偨偨傔払惉側傜偢丏傕偆彮偟偨偭偩傫偩偗偳側偀丒丒
婡夛偑偁傟偽傑偨傗傝偨偄偗偳丆婛偵偙偺僔僗僥儉偼僶儔偝傟偰傞偐傜丆傑偨嶌傝捈偟偵丒丒丒
帺暘偱愝寁偟偰偣偙偣偙嶌偭偨偺偼丆僪儔僀僽夞楬偲埵憡専弌夞楬丏
惍棳夞楬偼僟僀僆乕僪儌僕儏乕儖丆僀儞僶乕僞偵偼嶰旽惢偺DIP-IPM(Intelligent Power Module)傪梡偄偰偄傑偡丏
偱丆夞楬恾偱偡丏
僪儔僀僽夞楬
堦斣塃偵偁傞偺偑DIP-IPM偱偡丏偦偺偡偖嵍偵偁傞丆僐儞僨儞僒傗僟僀僆乕僪偑廤崌偟偰偄傞晹暘偼丆
僽乕僩僗僩儔僢僾夞楬偲偄偭偰丆偙偺IPM傪摦嶌偝偣傞偨傔偵昁梫側夞楬孮偱偡丏
摦嶌偲偟偰偼丆嵍(SuperH)偐傜棃傞儅僀僐儞偺怣崋傪U2(74AC540)偱斀揮仌僶僢僼傽偟偰恀傫拞偺僼僅僩僇僾儔
U3乣U8(TLP554)傪僪儔僀僽偟丆IPM傊偲怣崋傪擖椡偟偰偄傑偡丏
堦曽丆IPM偺僄儔乕弌椡抂巕(FO)偐傜晧偺怣崋偑弌傞偲丆愭傎偳偲偼媡偵U9(TLP554)傪捠傝U10(4044B)偺RS-FF
傪捠傝丆U2偺Output-Enable抂巕傪OFF偵偟偰SuperH偺僀儞僶乕僞摦嶌怣崋傪幷抐偟丆掆巭偟傑偡丏
側傫偲側偔傢偐偭偰偄偨偩偗傑偟偨偱偟傚偆偐丏枩偑堦丆傢偐傜側偔偰抦傝偨偗傟偽丆捈愙杮恖偵暦偄偰偔偩偝偄丏
埵憡専弌夞楬
偙偺夞楬偼丆儘乕僞儕乕僄儞僐乕僟(1200pulse/r)偺僷儖僗弌椡(B)傪丆僇僂儞僞IC偺U4(74HC4040)
偱悢偊偰偍傝丆1夞揮偱1僷儖僗偩偗弌偡M怣崋枅偵儕僙僢僩傪偐偗傞巇條偱偡丏
偙傟偱1200僷儖僗枅偵僇僂儞僞偑儕僙僢僩偝傟丆僇僂儞僞偑僆乕僶乕僼儘乕偡傞偙偲傕側偄丆
偲偄偆傢偗偱偡丏
偍傑偗
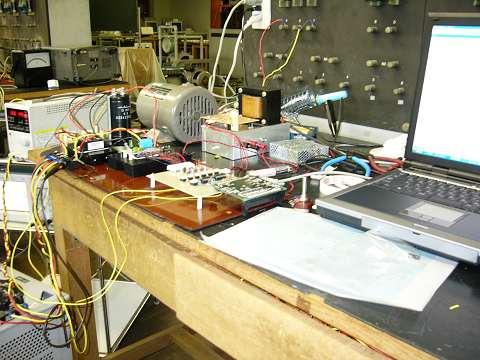
僔僗僥儉偺幨恀
墱偵偁傞偺偑丆0.75kw偺桿摫儌乕僞偱偡丏
偦偟偰堦斣庤慜(僷僜僐儞偠傖側偄傛)偺椢偭傐偄偺偑SH儅僀僐儞(SH7045)丏
1戜28000墌偟傑偡丏夡偟偨傜偍栚嬍偱偡丏夡偝側偐偭偨偗偳丏
偦偟偰偦偺夞楬偵偔偭偮偄偰傞偆偡椢偺夞楬偑丆僪儔僀僽夞楬偱偡丏
偙偺尋媶偱堦斣儕僜乕僗怘偭偨偺偼丆偙偺夞楬偺愝寁偩偭偨偲巚偄傑偡丏
偙偺幨恀傪嶣偭偨帪揰偱偼丆傑偩埵憡専弌夞楬偼晅偄偰傑偣傫丏
僩僢僾儁乕僕傊