 Flexible arm of
Prof.Kondo's Lab.
Flexible arm of
Prof.Kondo's Lab.
Up:Hiroshi Fujimoto's Home page
1. Resume ,
2. Research ,
3. Publications ,
4. Hobbies
 In April 2001, I joined the
Power Electronics Laboratory (P.E. Lab.) in
Nagaoka University of Technology, as a research associate, where I am advising
some graduate students both of
Prof. Kondo's Lab and
Prof. Noguchi's Lab.
We are often discussing with
Prof. Ohishi's Lab.
In April 2001, I joined the
Power Electronics Laboratory (P.E. Lab.) in
Nagaoka University of Technology, as a research associate, where I am advising
some graduate students both of
Prof. Kondo's Lab and
Prof. Noguchi's Lab.
We are often discussing with
Prof. Ohishi's Lab.
The research projects of our group are on high precision servo system of hard disk drives, motion control of flexible arms, high performance inverter controllers, and motion control of electrical vehicles in snowy condition.
In order to introduce some projects of our research group, a part of our publications is listed below, which are co-authored by P.E. Lab. students.
 Head positioning control of hard disk drive (HDD)
Head positioning control of hard disk drive (HDD)
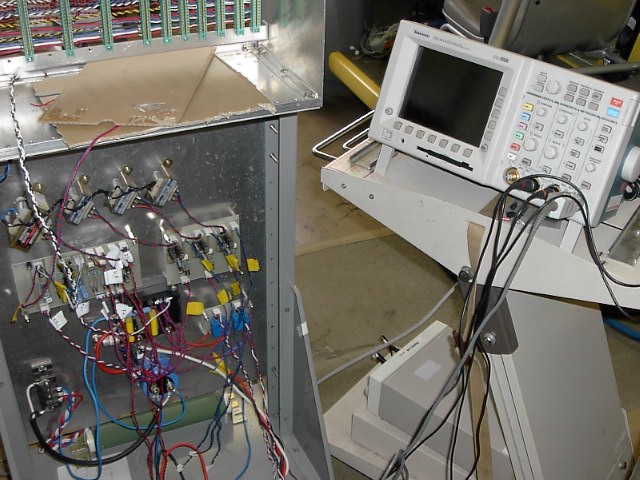 High performance control of inverter
(Both RT-Linux and DSP are available as controller.)
High performance control of inverter
(Both RT-Linux and DSP are available as controller.)
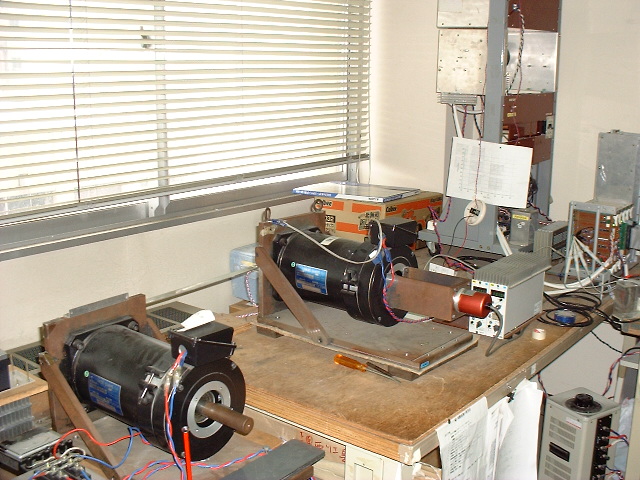
 Robot manipulator (control system is under construction)
Robot manipulator (control system is under construction)
 Electrical vehicle of
Prof. Noguchi's Lab.
Electrical vehicle of
Prof. Noguchi's Lab.
Project description by Mr. Saito in Prof. Noguchi's Lab.
(Japanese version only)
Flexible arm of
Prof.Kondo's Lab.
Because the discrete-time controller has to deal with continuous-time signals in the digital control systems, it needs to have two samplers for the reference signal and the measured output, and one holder on the control input. In conventional digital control systems, single-rate control is generally assumed, where all kinds of sampling periods are set to be equal. On the other hand, the objective of this dissertation is to construct an integrated theory of multirate sampling control and to further develop it into practical control methods.
This dissertation consists of two parts: theory and applications. In the first part, generalized theoretical framework for multirate sampling control is constructed, which is based on novel control strategies of 1) perfect tracking control (PTC) by multirate feedforward control, 2) perfect disturbance rejection (PDR) control by multirate feedback control, and 3) perfect state matching (PSM) control by multirate sampling control. In the second part, the proposed theory is applied to practical motion control systems, and advantages of the proposed methods are demonstrated by simulations and experiments.
The details of each chapter are as follows.
In chapter 2, perfect tracking control (PTC) method is proposed based on multirate feedforward control. The advantages are 1) the proposed multirate feedforward controller eliminates the notorious unstable zero problem in designing the discrete-time inverse system, 2) the plant state matches the desired trajectories at every sampling point of reference input, and 3) the feedback characteristics are completely independent of the proposed controller. Thus, highly robust performance is assured by the robust feedback controller.
In chapter 3, novel multirate feedback controllers are proposed for systems with hardware restrictions, where the sampling period of plant output is relatively longer than the control period of plant input. The proposed feedback controller assures perfect disturbance rejection (PDR) at intersample points in the steady state. Next, the developed method is applied to the periodic disturbance rejection problem. The novel scheme of repetitive control is proposed based on the open-loop estimation and switching function, which enables rejection of periodical disturbance without any sacrifice of the closed-loop characteristics.
In chapter 4, a novel discretization method for continuous-time controllers is proposed based on perfect state matching (PSM) control. In this method, multirate input control is employed, and the states of the continuous-time system completely match those of the obtained sampled-data system at every sampling period. Next, discretization method of observer is proposed based on multirate output control.
In chapter 5, the perfect tracking control (PTC) is applied to several motion control systems. First, the position control system of servomotor for robot manipulators is considered. Combining the proposed feedforward controller with H-infinity robust feedback controller, perfect tracking performance is achieved with robustness. Second, the proposed method is applied to track-seeking control of hard disk drive (HDD) with long sampling period and time delay. For this system, it is shown that the proposed controller enables higher speed movement than the conventional single-rate controller.
In chapter 6, the perfect disturbance rejection (PDR) control is applied to track-following mode of HDD and visual servo systems. First, it is applied to reject the repeatable runout of HDD. Second, the proposed intersample observer compensates the phase delay and improves the stability margin of the closed-loop system. Third, the proposed method is applied to visual servo systems by introducing the workspace controller and nonlinear perspective transformation.
In chapter 7, the perfect state matching (PSM) control is applied to the motion control systems. First, the position control system for a dc servomotor with disturbance observer is utilized. Because the proposed method assures response matching independent of sampling period, it enables to bring out the maximum performance of a control system. Second, vibration suppression control is developed for two-mass systems in which the Nyquist frequency is relatively closed to the mechanical resonance mode.
In chapter 8, the proposed three control schemes of PTC, PDR, and PSM are reviewed, and the obtained results are classified by the hardware restriction of their sampling schemes and according to the feedforward and feedback approaches. As a conclusion, this dissertation succeeded in constructing a general and integrated framework of multirate sampling control. While the theoretical novelty is important, the engineering significance is immeasurable, since the proposed methods proved to be practical methods which make full use of computer performance. In the application examples, the performance of the proposed method was superior to that of the conventional method. Moreover, the proposed method has already been implemented in commercial products. These facts show that this dissertation is a major breakthrough in control engineering and has broken down the wall which conventional technology could not overcome.